
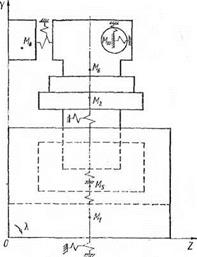
Основой для составления расчетной математической модели, описывающей динамическую систему станка, явились результаты стендовых испытаний виброактивности его отдельных узлов. Анализ экспериментальных данных и технической документации позволил представить динамическую систему станка в виде шестимассовой модели, показанной на рис. 2.6, 2.7.
Передаточная функция упругой системы станка рассматривается как взаимосвязь действующих сил и перемещений в зоне резания. Колебания измеряются в
|
|
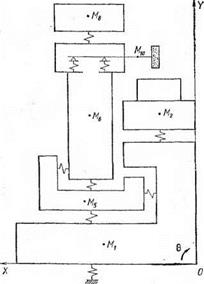
направлении, перпендикулярном к обрабатываемой поверхности детали.
Механическая модель представлена в виде отдельных сосредоточенных масс, соединенных жесткостями и обладающих определенным демпфированием колебаний. Исходя из пространственной модели, каждое тело обладает шестью степенями свободы, т. е. возможностью смещения относительно соседних тел по координатам X, Y, Z и углам поворота Я, ц, 0 соответственно вокруг этих осей.
Для сокращения возможного числа степеней свободы, сокращения порядка системы уравнений и упрощения схемы многие связи между соседними телами считаются жесткими в тех случаях, если ожидаемое перемещение по ним либо незначительное, либо мало влияет на относительное вертикальное смещение шпинделя со шлифовальным кругом и стола.
Исходя из этого, были выбраны 18 степеней свободы, представленных в табл. 2.1.
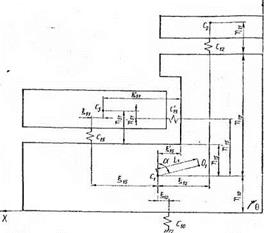
Для каждой из масс в соответствии с расчетной динамической моделью (рис. 2.6, 2.7) составлены расчетные схемы и получены аналитические выражения, отражающие ее взаимодействие с соседними массами в общей модели станка.
На рис. 2.8, 2.9 в качестве примера представлены расчетные схемы станины в плоскостях XOY и YOZ.
Приведем метод описания колебаний дифференциальными уравнениями. Кинетическая энергия станины
 т = (All fCnA)2 + ІУх + Ш2 + 2іЗ +
т = (All fCnA)2 + ІУх + Ш2 + 2іЗ +
Dy —- Mi (t/i — j- Ii6j),
![]() Dz = MiZi,
Dz = MiZi,
![]() Db = Мг [4 i6j — f- ІУі + 2|0[)] 4- Jz Oi. —
Db = Мг [4 i6j — f- ІУі + 2|0[)] 4- Jz Oi. —
|
|
Потенциальные энергии стыков
я15= — і — [с^6 (.%+ІівЄі — y5f+czls г+сР1ъ 02 + cjf 02], (2.24)
/С
І7и=4- И; (?Л +ЬА ~ У2)г + б12 (Zl-z2)2-K°2 02]. (2.25)
2
На станину действует обобщенная сила Fx = (0, /у, 0).
|
Рис. 2.7. Расчетная динамическая схема универсально-заточного станка мод. ЗМ642Е в плоскости YOZ |
Использовав уравнения Лагранжа и полученные выше соотношения, запишем уравнения движения для
1-й массы:
ті (У і + SA) + сн) (Уі + SuA) + 6’Yg (.Уі ~Ь Sis®i — Уь) +
"і — сТг (Уі + Si2®i — У2) ~Ь ha (Уі + ЬобО “Ь Мб (Уі — Si501 —
— У б) + {Уі + Si2®r—" Угі ~ 0> (2.26)
miZi + cf02! + cbzx + cf2 (zx — za) — f ftf0Zx — ftf5Zi +
+ hi2 {Zi — 2a) = Fc, (2.27)
[Чі^і + Si (*/i 4- SA)]— J z 0i + SiocS0 (Уі Ію®і) +
|
Узел |
* |
Y |
* |
Я |
u |
e |
|
Станина и основание стола (1) |
Ух |
*1 |
elf |
|||
|
Стол (2) |
— |
Уі |
га |
— — |
— |
■— |
|
Каретка (5) |
— |
Уа |
— |
— |
— |
•— |
|
Колонна со шлифовальной |
||||||
|
бабкой (6) |
— |
Уе |
Kg |
—. |
ee |
|
|
Электродвигатель привода |
e8 |
|||||
|
шпинделя (8) |
— |
Уа |
*8 |
Ks |
—. |
|
|
Шпиндель со шлифовальным |
010 |
|||||
|
кругом (10) |
Ухо |
210 |
Р10 |
+ {Уі + Еівбі — Уь) + Ііг^Уг (Уі + ^12®1 Уа) +
(2.28)
+ Ьв^Гв {Уі+ЬА) + іі5—/іТб (уі+ьА й)+
+ £12^12 (Уі + |і20і — Уя) + (сіо + с% + Сіь + С12) 0г — j-
+ (^10 + ^5 + /ііб + ^2) 0 = 0.
Здесь т), І с индексами — координаты расположения соответствующих стыков относительно центров жесткости (г| — по оси OY, | — по оси ОХ); первый индекс при них
|
|
обозначает центр жесткости, второй — номер сопрягаемой массы; т] и | с одним индексом — координаты центра жесткости относительно центра массы; Jz — момент инерции относительно оси OZ; Fc — усилие подачи; ту — масса.
где М, С, Я, Л, Лт — матрицы соответственно инерционная, жесткости и демпфирования системы, координатная и транспонированная.
Аналогично получены уравнения движения остальных масс динамической системы станка. В общем виде уравнения, описывающие относительные колебания шпинделя со шлифовальным кругом и стола, будут иметь вид
В рассмотренной схеме внешнее воздействие на систему упрощено и в результате правки шлифовальный круг приобретает эксцентриситет. Когда внешние воздействия на динамическую систему различны и описываются более сложными законами, колебания оси круга и линии контакта его образующей с деталью описываются также более сложными законами, но механизм появления данных колебаний остается таким же, как и в рассмотренном случае. В режиме правки колебания условной линии контакта образующей круга с деталью отсутствуют, а в режиме шлифования они равны разности колебаний оси шлифовального круга относительно обрабатываемой детали в режимах правки и шлифования.