
При описании процессов функционирования динамических систем станков обычно с целью упрощения разрабатываются плоские модели. Вместе с тем при описании несимметричных конструкций для обеспечения требуемой точности расчета необходима разработка пространственной модели, более полно отражающей взаимодействия отдельных систем станка.
Колебания элементов станка опишем уравнениями Лагранжа:
В качестве обобщенных координат gi выберем Хі, у і, Zi> — перемещения при поступательном движении центров жесткости элементов станка, или, что то же самое, центров тяжести элементов относительно положения равновесия, и p, j, 0і — углы поворотов элементов станка в положительном направлении относительно осей СХ, CY, CZ правой системы координат, расположенной в
центре жесткости. Кинетическая энергия системы Т равна сумме кинетических энергий элементов:
т = 2 Т, = |](7м + т.,)= 2 ).
(2.2)
Здесь Тоі ‘— кинетическая энергия поступательного движения элемента; Т(ЛІ — кинетическая энергия вращательного движения элемента вокруг его центра масс; щ—масса элемента; vQi >— абсолютная поступательная скорость центра масс О элемента; JQl ■— момент инерции элемента относительно оси вращения его, проходящей через центр масс; o)j — угловая скорость вращения элемента относительно этой оси.
Потенциальная энергия П упругой системы подсчитывается как сумма энергий соответствующих пружин. При этом пружиной заменяется или сама масса, или соответствующий стык. Если Л{ — смещение t-й пружины, с{, — соответствующая ей жесткость, то
Я = 4-2МЛг)[3]. (2.3)
Диссипативная функция задается выражением
ф= 4-2МЛ*)2> (2.4)
І
где ht’— коэффициент демпфирования соответствующего стыка.
Обозначим координаты центра жесткости элемента через С{хс, ус, zc), центра тяжести—через О(х0, у0, z0) (индекс і опускаем) и положим
б : — (б^., 6у, 6^) = (х§ хс, у0г ус, z0 — zc). (2.5)
Если система координат расположена в центре жесткости элемента, то б — радиус-вектор центра тяжести.
Приведем формулы для вычисления координат центра тяжести элемента:
Здесь т — масса элемента; mh — массы составляющих частей элемента; xh, yh, zh — их координаты.
Моменты инерции элемента относительно осей ОХ, OY, OZ задаются формулами
Jx = 2 т* + 4)’ Jy = 2 (xl +
k ft
Jz^rnh{xi + yl), (2-7)
 |
 |
ft
а моменты инерции относительно координатных плоскостей соответственно равны
^XY tftkXhUhi ^YZ ftlhtlhZh, ^XZ
h ft ft
(2.8)
Рассмотрим пример определения координат центра жесткости элемента, имеющего стыки, изображенные на — рис. 2.1.
Пусть Ai, Д2, Дз — перемещения стыков; а и b — геометрические размеры элемента. Составим уравнение моментов сил относительно центра жесткости С:
cAi ф — Ус) — с2Д2</е — с3Д3 (а/2 — хс) = 0.
Полагая Ді = Д2 = 0, получаем хс = а!2, а при Лі = Д2,
А3 = 0(/с = сф/фі + с2).
Приведем более детализированные формулы для
вычисления кинетической и потенциальной энергий элементов.
Случай плоского движения. На схеме для определения кинетической энергии (рис. 2.2) 0—угол поворота элемента, а—угол между осью CY и вектором б = СО, отсчитываемый по часовой стрелке, т. е. в положительном направлении согласно правой системе координат CXYZ. Пусть о = (х, у) —скорость центра масс при плоскопараллельном, движении, и — (их, Uy) — скорость при вращении относительно центра жесткости С. Тогда длина дуги I — L0, и— = І = L0, их — — и cos а = — L0 cos а = —6у0, иу =
= —и sin а = —L0 sin а =6×0 и скорость центра масс
У -f — и = (х — 6у0, у + бх0).
Кинетическая энергия
т= -^-т|у + и|2 + -~-/0®2 =
= — L {гп [(.к — бу0)2 + (у + 6Х0)21 + /о02}. (2.9)
На рис. 2.3. приведены схемы для определения потенциальной энергии элементов, соответствующие двум различным случаям.
Для упругой массы и жесткого стыка (рис. 2.3, а) вводится крутильная жесткость Лог, соответствующая углу поворота вокруг центра жесткости Ct. Если смещение между центрами жесткостей Сь С2 равно I, то деформация
ІС
первой массы будет А і у —— — —- , а второй Д2Х —
С1Х + С2Х
tclx
= —•—:—— . Так как / = х2 — хъ то
 |
С1Х + С2Х

(х2 — Xj)2 + clYy + (2.10)

![]() + с„1% + КаЩ + КюЩ.
+ с„1% + КаЩ + КюЩ.
На рис. 2.3, б, изображающем жесткую массу и упругий стык, через gij, т)ц обозначены координаты /-го стыка I и II пружин:
Ах = t/i — J — £п01, Д2 — Х — Х2— %2®1— ТІ22021
а потенциальная энергия стыков
п = [сп (//іЧ-|п6,і)аЧ-С2х(х. г-х2 — Г]і20і—1>2202)2]. (2.11)
Случай пространственного движения. В общем случае кинетическая энергия вращения вокруг масс задается формулой
Та= ~~ (Jxa> х + JY*l + JZ*-2/xyc°xcoy —
2^угС0у0^х 2J g (2.12)
 |
|||
где сох, соу, a>z— угловые скорости при вращении вокруг осей OX, OY, OZ, а моменты инерции подсчитываются относительно системы координат, помещенной в центр тяжести и при вращении элемента вокруг центра жесткости на
Рис. 2.3. Расчетная схема для определения потенциальной энергии: а — упругая масса, жесткий стык; б — жесткая масса, упругий стык
перемещения, соответствующие вращениям вокруг координатных осей и — щ — J — щ, щ, из рис. 2.4 получаем
«і = ГіХ, «2 = г2р, «8 = га0;
«їх = 0, «іу = — 8zK uiz — 6yh;
U2X = бх Р, «2Г == о, W22 = — бхр;
«ЗХ = — бу 0, Ызу = бх 6, «32 — О-
 |
Здесь Шх, Шу, Шг—проекции перемещения щ на соответствующие координатные оси, а бх, 6у, бх— координаты радиус-вектора центра тяжести.
V — J — и — (х — j — бх Р — 6у 0, у — бх X — f — 6×0, 2 — f- бу % — бхр).
(2.13)
Из (2.2), (2.12) и (2.13) находим кинетическую энергию Т = —{ш [(х — J — бх р — бу б)2 + (у — бх ^ + бх©)2 +
+ (z + 6y X — 8x P)21 + — W + + Jz№ —
— 2Jxy%li — 2/yzp0 — 2/ zx6X} • (2-14)
В частном случае если р = 0, то
Т = ——- {ш [(х — 8у 0)а + (у — 8z Я + 8х0)2 + (z + Sy X)2]-}-
+ /xX2 + /z02 — 2УмвХ>,
‘ Г = — {т [(х —110)2 + (у — фХ + £0)2 + (г + їіХ)2] +
2
![]() f — JхХ2 + Jz 02 — 2J2x0 X},
f — JхХ2 + Jz 02 — 2J2x0 X},
где (|, г], я};)- — относительные координаты центра тяжести. В частности, если центр жесткости совпадает с центром тяжести, то для плоскопараллельного движения
![]() (2.16)
(2.16)
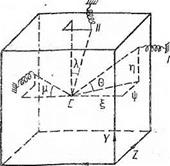
Потенциальную энергию для элемента со стыками в пространстве можно вычислить, рассматривая схему, изображенную на рис. 2.5. Найдем смещения в стыках, расположенных вдоль координатных осей. Если |, rj, я];— относительные координаты стыка в системе координат, связанной с центром жесткости элемента, то
 ‘Ах = X + фр — Г|0,
‘Ах = X + фр — Г|0,
Ду = у — фХ + к, Az = z + т)Х — £р.
(2.17)
Введя векторы-столбцы
Рис. 2.5. Схема ‘ для определения потенциальной энергии для элемента в пространстве
 |
и матрицу координат
уравнения (2.17) можно записать в матричном виде
В дальнейшем при разработке динамической модели универсально-заточных станков будут использованы следующие обозначения. Стыки между і-й и /-й массами обозначим через Кц. Это обозначение симметрично, т. е. Кц= = Кц. Пусть йц = (іід rj^-, ф^)—векторы относительных координат стыка, очевидно, йцфйн. Через cxlp cf., cf. обозначим линейные, а через с., cf., с?. —угловые жесткости стыков, tij, h’i/, hij, h%, h%, h% — соответственно демпфирования в стыке Кц. Через Tt обозначим кинетическую энергию і-й массы, Пи и Фц — — соответственно потенциальная энергия и диссипативная функция стыка Кц.
Связь между с и h приближенно может быть установлена выражением
h = — Ї-Vmc, (2.21)
2зт
где — относительное рассеяние энергии в стыке.