
The dynamic compliance of the mechanical system, which consists of the workpiece, the grinding wheel, and the grinding machine, is represented by
and
![]() u = cosacos(a — в)
u = cosacos(a — в)
where a is the angle between the direction of the depth of cut and the direction of the natural frequency mode of the mechanical system, в is the angle between the direction of the depth of cut and the direction of the resultant grinding force, km is the static stiffness of the mechanical system, and Ф( ja) is the nondimensional dynamic compliance.
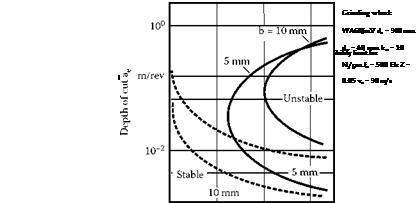 |
FIGURE 8.11 Stability limit for grinding chatter.
The practical grinding machine has many degrees of freedom; however, in most cases the model is simplified as having a single degree of freedom in the theoretical investigation. It is important to notice that the orientation factor u has a significant influence on the resultant dynamic compliance.